| Phần mềm Flownizer đo tốc độ hình ảnh hạt tiêu chuẩn mới với phương pháp tương quan chéo trực tiếp sẽ giúp đo lường chính xác cao và mô phỏng hóa dòng chảy. |
| 2D.ver * hai thành phần u (x) v (y) trong miền phẳng 2D |
| 3D.ver * ba thành phần u (x) v (y) w (z) trong miền phẳng 2D |
| Có thể phân tích được vận tốc, độ lệch chuẩn, ứng suất Reynolds, xoáy, động năng xoáy. |
| Flownizer xử lý ngay lập tức các hình ảnh tuần tự được cung cấp từ tất cả các loại dụng cụ nhiếp ảnh như máy ảnh tốc độ cao/ máy ảnh màn trập kép / máy quay video thành dữ liệu kỹ thuật số với một kiến trúc máy tính hoàn toàn mới. |
| Các phiên bản Flownizer |
| ♦ PIV 2D-2C Phép đo 2 vectơ vận tốc thành phần trong miền phẳng 2D dựa trên Phép đo vận tốc hình ảnh hạt có mật độ hình ảnh cao, theo dõi nhóm hạt nhỏ. |
| ♦ PTV 2D-2C Phép đo 2 vectơ vận tốc thành phần trong miền phẳng 2D dựa trên phép đo vận tốc theo dõi hạt, theo dõi từng hạt riêng lẻ. |
| ♦ PIV 2D-3C Phép đo 3 vectơ vận tốc thành phần trong miền phẳng 2D dựa trên phép đo vận tốc hình ảnh hạt lập thể. |
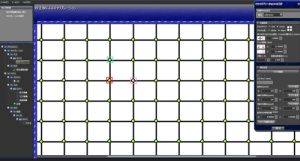
| Hiệu chuẩn |
| Flownizer hỗ trợ phương pháp hiệu chuẩn lưới và cung cấp dữ liệu có độ chính xác cao. |
| Việc hiệu chỉnh Flownizer sẽ khắc phục sự biến dạng của ống kính và chuyển đổi dữ liệu XY trong phép chiếu 2D (dữ liệu XYZ trong 2D3C). |
 |
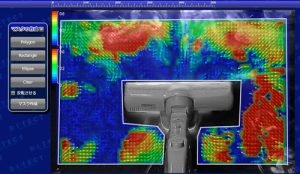
| Tiền xử lý |
| Chức năng đánh dấu sẽ giúp bạn tránh những khu vực không cần thiết sẽ gây ra các vectơ lỗi. |
| Các công cụ tiền xử lý như kỹ thuật phân biệt nền, bộ lọc và số học sẽ giúp bạn sửa đổi hình ảnh gốc chất lượng kém thành hình ảnh có thể phân tích. |
 |
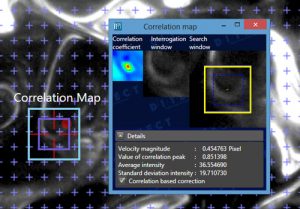
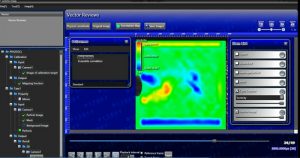
| Bản đồ hệ số tương quan |
| Flownizer có chức năng xem trước hoạt ảnh cho bản đồ hệ số tương quan và các thông tin khác. |
| Cửa sổ hình ảnh câu hỏi hiên thị hội thoại, hình ảnh cửa sổ tìm kiếm và bản đồ màu của hệ số tương quan trong hai hình ảnh này. |
 |
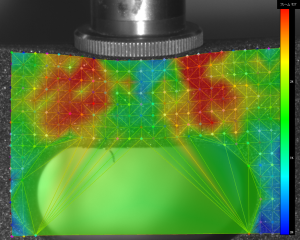
| Phân tích dữ liệu |
| Danh mục kết quả phong phú như Vectơ thô, Trung bình, Góc, Đường dòng, Đường vân, Đường dẫn, Độ xoáy, Động năng xoáy, Ứng suất Reynolds, Độ căng gradient vận tốc, Độ lệch chuẩn, Tenxơ gradient vận tốc có thể được minh họa. |
 |
| Thông số kỹ thuật | |
| Phương pháp đo | PIV 2D2C / PTV 2D2C (2D/3D), PIV 2D3C(3D) |
| Phương pháp tính toán | Tiêu chuẩn (tương quan chéo trực tiếp), Biến dạng ảnh, Đệ quy |
| Tùy chọn tính toán | Hiệu chỉnh dựa trên tương quan (CBC), Phương pháp tương quan mặt nạ hạt, Trung bình tương quan |
| Hiệu chuẩn | Hai điểm, Thủ công đa điểm, Tự động đa điểm |
| Tiền xử lý | Bộ lọc, Số học, Độ sáng và Độ tương phản, Bộ lọc H-dome, Liên ảnh, Đánh dấu |
| Chức năng xem trước | Bản đồ hệ số tương quan |
| Vectơ đầu ra | Kết quả (UV), U (x), V (y) [2D / 3D] Kết quả (UVW), W (z) [3D] |
| Hậu xử lý | Xóa, Thay thế, Làm mịn |
| Xử lý ban đầu | Chuyển đổi (lật, xoay, cắt, kích thước canvas, thay đổi kích thước, chỉnh sửa keystone, chuyển đổi affine), Số học / Số học khung (cộng, nhân, chia, trừ, trừ tuyệt đối, so sánh tối / sáng, VÀ, HOẶC, Trung bình) (khung bằng max, mini, trung bình, trung bình, max-mini), Màu (độ tương phản, độ sáng, gamma, thang độ xám, nhị phân, tiêu cực, posterization, tăng độ sâu màu), Làm mịn, loại bỏ tiếng ồn, Bộ lọc, Kênh, Phân chia trường, Chuyển khung hình, Pixel sự thay đổi |
| Xử lý sau | Loại bỏ, nội suy, làm mịn |
| Hiển thị màu hoạt ảnh | Tối đa 16 sắc thái (HSV) |
| Đường viền màu | Fine, Coase, Line, Coase + Line |
| Mục mô phỏng/Tính toán | Vectơ thô, Vectơ không hợp lệ, Vectơ đã hiệu chỉnh, Vectơ trung bình, Vectơ trung bình tức thì, Tương quan tổng thể, Hệ số tương quan, Đường dòng, Đường vân, Đường dẫn, Độ xoáy, Động năng xoáy, Ứng suất Reynolds, Độ căng gradient vận tốc, Độ lệch chuẩn, Tenxơ gradient vận tốc |
| Hiển thị đồ thị | Điểm, Đường, Khu vực (khoảng cách / vận tốc) |
| Định dạng hình ảnh được hỗ trợ | Video: AVI / WMV, Ảnh tĩnh tuần tự: BMP / JPEG / TIFF / PNG |
| Định dạng dữ liệu được hỗ trợ | Nhị phân (di5), CSV |
| Hệ điều hành được hỗ trợ | Windows7, 8.1, 10 (32 hoặc 64bit) |
| SIMD được hỗ trợ | SSE3 |
| Tùy chọn | |||
 |
Tấm hiệu chuẩn |  |
Hạt đánh dấu |
 |
Nguồn sáng xung/liên tục |  |
Khớp nối Scheimpflug |