










| Bộ phần mềm rc_reason |
| Tất cả rc_visards và rc_cubes đều đi kèm với cùng một gói phần mềm tích hợp toàn diện. |
| Tuy nhiên, có thể được nâng cao hơn nữa với bộ phần mềm rc_reason mô-đun, để tối ưu hóa hiệu suất cho các ứng dụng rô bốt cụ thể. Các thành phần rc_reason có thể dễ dàng được kích hoạt trên bo mạch bất kỳ rc_visard nào và vận hành trực quan thông qua giao diện người dùng tiêu chuẩn của cảm biến. |
| CADMatch | 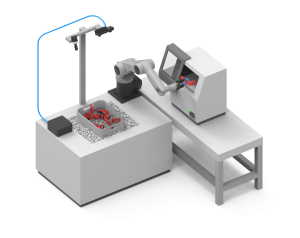 |
| Mô-đun rc_reason CADMatch cho phép hệ thống rô bốt phát hiện, xác định vị trí và chọn đối tượng một cách đáng tin cậy từ các vật mang tải không trộn lẫn, hoàn toàn độc lập với vị trí và hướng của đối tượng.
Mô đun phần mềm sử dụng mô hình CAD làm đầu vào, các quy trình học máy dựa trên AppliedAI và giao diện người dùng trực quan cao. Phần mềm cho phép đặc tả một hoặc nhiều điểm nắm trên mỗi đối tượng, do đó cho phép gắp bằng kẹp hai ngón tay hoặc thiết bị hút. Ứng dụng này có thể làm tăng đáng kể hiệu quả của các quy trình sản xuất, ví dụ: tự động hóa chăm sóc máy. |
|
SilhouetteMatch |
| Mô-đun rc_reason CADMatch cho phép hệ thống rô bốt phát hiện, xác định vị trí và chọn đối tượng một cách đáng tin cậy từ các vật mang tải không trộn lẫn, hoàn toàn độc lập với vị trí và hướng của đối tượng.
Mô-đun rc_reason SilhouetteMatch phát hiện vị trí và hướng của các đối tượng tương đối phẳng được định vị trên một bề mặt phẳng trong các cảnh không trộn lẫn. Bằng cách khớp cảnh ở tay với mẫu đã dạy trước đó, vị trí và hướng 3D được xác định cho từng đối tượng và có thể xác định các điểm gắp. Các ứng dụng điển hình bao gồm chăm sóc máy móc hoặc làm rỗng vật mang tải của một số lớp đối tượng (tách biệt). |
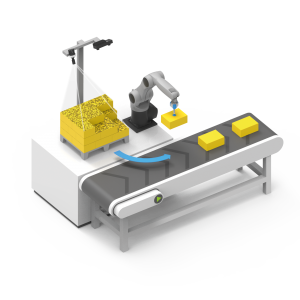
| BoxPick | 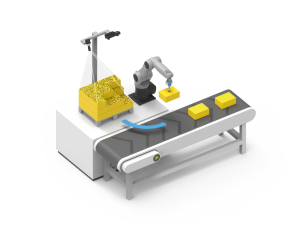 |
| Mô-đun rc_reason BoxPick cung cấp giải pháp cho các ứng dụng chọn và đặt của rô bốt như nhấc ra / xếp vào và phân loại pallet.
Được trang bị với Mô-đun BoxPick, rc_visard phát hiện các bề mặt hình chữ nhật trên các phạm vi kích thước được xác định trước và tùy chọn tính toán các điểm nắm bắt tiềm năng. Nó cho phép phát hiện vị trí, hướng và kích thước của các đối tượng và cho phép robot đặt các đối tượng vào một vị trí xác định. |
|
 |
ItemPick |
| Mô-đun rc_reason ItemPick là một giải pháp cho các ứng dụng chọn và đặt của robot sử dụng bộ gắp hút: Nó tính toán các tư thế nắm bề mặt cho một thiết bị hút trên một vật thể nhất định.
Các ứng dụng ItemPick, đặc biệt hữu ích đối với các đối tượng hoặc không gian làm việc khó, có thể được tối ưu hóa bằng cách trang bị cho rc_visard một máy chiếu và Mô-đun điều khiển IO tương ứng. |
|
| Slam |  |
| SLAM (Xác định vị trí và Lập bản đồ đồng thời) cho phép rc_visard tạo một bản đồ về môi trường của nó, đồng thời ước tính vị trí hiện tại của nó. Đây là một phần quan trọng của điều hướng không cần GPS trên địa hình không xác định. Mô-đun SLAM chạy trên rc_visard, không cần phần cứng bên ngoài. | |
|
TagDetect |
| Thành phần TagDetect cho phép phát hiện mã QR và AprilTags một cách mạnh mẽ. Ngoài ra, nó tính toán vị trí 3D và hướng của mỗi thẻ liên quan đến cảm biến. Nó có thể được sử dụng, v.d. để xác định vị trí của cảm biến hoặc để xác định và định vị các đối tượng. Thời gian phát hiện của nó dưới 1 giây cho phép các ứng dụng hiệu quả cao.
Mô-đun này hiện được bao gồm trong phần mềm cơ bản của rc_visard và chỉ có sẵn để mua để nâng cấp rc_visard cũ hơn. |
|








