Khách hàng: Trường kỹ thuật tự động hóa, Đại học Hàng không và Du hành vũ trụ Nam Kinh (NUAA)
Ứng dụng: UAV, Lập kế hoạch đường đi, Bản địa hóa trong nhà, NUAA
Đối tượng: UAV
Thiết bị sử dụng: Hệ thống thu thập chuyển động của Nokov
Trong những năm gần đây, vai trò của UAV đã tăng lên đáng kể trong việc thực hiện các nhiệm vụ như trinh sát chiến trường, xác định mục tiêu, theo dõi và giao chiến. Việc hợp tác thực hiện các nhiệm vụ của nhiều UVA, được hỗ trợ bằng cách trao đổi thông tin giữa các UVA, cho phép đạt được các mục tiêu toàn cầu và cung cấp chức năng và hiệu quả vượt xa các UVA riêng lẻ. Phương pháp sử dụng nhiều UVA cho các ứng dụng này ngày càng trở nên phổ biến trong việc phát triển UVA.
Lập kế hoạch đường dẫn đa UVA trong thiết lập thử nghiệm
Để đảm bảo hoạt động hiệu quả theo thời gian thực của nhiều UAV, việc lập kế hoạch đường đi hiệu quả, bao gồm tránh chướng ngại vật và tránh va chạm, là điều cần thiết. Lập kế hoạch đường đi trực tuyến Multi-UVA cho phép các đàn UVA thích ứng với môi trường phức tạp và năng động, tránh các chướng ngại vật không xác định và tăng cường an toàn chuyến bay. Lập kế hoạch đường đi trực tuyến nhiều UVA phải xem xét không chỉ các hạn chế bay và điều kiện đe dọa của từng UVA mà còn các yếu tố như số lượng UVA, chức năng của chúng và phương pháp phối hợp, tạo ra vấn đề tối ưu hóa đa mục tiêu bị ràng buộc trên quy mô lớn.
Thí nghiệm chuyến bay
Nhóm do Lv Xunheng dẫn đầu tại Trường Tự động hóa, Đại học Hàng không và Du hành vũ trụ Nam Kinh, đã nghiên cứu thuật toán lập kế hoạch đường đi trực tuyến đa UVA dựa trên Hybrid A* cải tiến. Họ đã xây dựng một hệ thống mô phỏng và nền tảng thử nghiệm để xác thực khả năng và độ ổn định trong thời gian thực của thuật toán. Kết quả nghiên cứu đã được công bố tại Hội nghị quốc tế lần thứ 6 về Hệ thống tự động vào năm 2023.

Sử dụng hệ thống chụp chuyển động NOKOV để thu thập vị trí thời gian thực của UVA
Trong thí nghiệm, UVA được trang bị camera đo độ sâu để cung cấp bản đồ độ sâu nhằm nhận biết môi trường xung quanh. Máy tính trên bo mạch chịu trách nhiệm trao đổi thông tin đường dẫn giữa các UVA và chạy thuật toán lập kế hoạch đường dẫn. Hệ thống ghi lại chuyển động NOKOV được sử dụng để thu thập thông tin vị trí chính xác cho từng UVA.
Mục tiêu của thí nghiệm là cung cấp đồng thời các điểm mục tiêu cho ba UVA, với yêu cầu mỗi UVA có thể tiếp cận điểm mục tiêu một cách an toàn trong khi xem xét các hạn chế về tránh chướng ngại vật và ngăn ngừa va chạm.
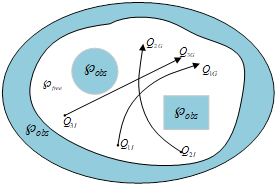
Nhóm nghiên cứu đã cải tiến mô hình chướng ngại vật vận tốc truyền thống và đưa ra mô hình chướng ngại vật vận tốc ba chiều phù hợp với UVA 6 bậc tự do. Mô hình này được sử dụng để tính toán tốc độ bay an toàn của UVA trong không gian ba chiều.
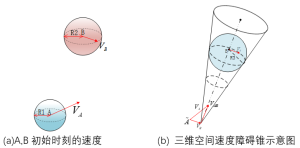
Sơ đồ mô hình chướng ngại vật vận tốc 3D
Mỗi UVA sử dụng thuật toán Hybrid A* để lập kế hoạch đường đi phân tán. Sau khi lập kế hoạch đường đi, việc đánh giá rủi ro va chạm sẽ được tiến hành. Nếu phát hiện nguy cơ va chạm, tốc độ bay an toàn sẽ được tính toán dựa trên mô hình vận tốc chướng ngại vật ba chiều. Những tốc độ bay an toàn này sau đó được sử dụng làm ràng buộc tối ưu hóa. Việc điều chỉnh đường đi được thực hiện bằng phương pháp trường điện thế để đạt được đồng thời cả tác dụng tránh chướng ngại vật và ngăn ngừa va chạm, đảm bảo rằng UVA có thể tiếp cận các điểm mục tiêu một cách an toàn trong khi tuân thủ các hạn chế này. Cách tiếp cận này kết hợp lập kế hoạch đường đi, đánh giá rủi ro va chạm và điều chỉnh vận tốc để nâng cao tính an toàn và hiệu quả của các hoạt động nhiều UVA.
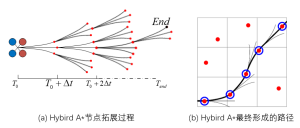
Sơ đồ nguyên lý của thuật toán hoạch định đường dẫn Hybrid A*
Kết quả thực nghiệm
Mỗi UVA thực hiện lập kế hoạch đường đi trực tuyến, ban đầu bay tới vị trí mục tiêu của nó. Trong suốt chuyến bay, nó liên tục kiểm tra các chướng ngại vật và đánh giá nguy cơ va chạm với các UVA khác. Nếu có nguy cơ va chạm, đường đi sẽ được quy hoạch lại. Các UVA tiếp tục điều chỉnh đường đi của chúng cho đến khi chúng đến được các điểm mục tiêu tương ứng một cách an toàn, đảm bảo rằng chúng di chuyển xung quanh các chướng ngại vật và tránh va chạm với nhau trong thời gian thực.
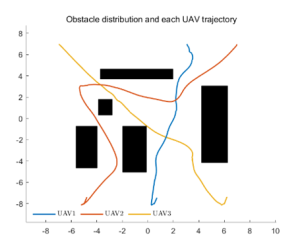
Kết quả đường đi thời gian thực của các thử nghiệm bay đa UAV trong nhà
Ba chiếc UVA bay từ lúc cất cánh đến các điểm mục tiêu tương ứng, gặp nhiều chướng ngại vật trên đường đi. Mỗi UVA điều chỉnh đường đi của nó để đến điểm mục tiêu trong khi tuân thủ các hạn chế về tránh chướng ngại vật và ngăn ngừa va chạm.
Trong đó, UAV1 có đường bay 8 m, tốc độ trung bình 0,8 m/s, UAV2 có đường bay 15 m, tốc độ trung bình 1,1 m/s và UAV3 có đường bay 19 m. tốc độ trung bình 1,1 m/s.
Kết quả chỉ ra rằng bằng cách sử dụng thuật toán do nhóm nghiên cứu đề xuất, nhiều UVA có thể thực hiện lập kế hoạch trực tuyến cùng một lúc. Các đường dẫn được lên kế hoạch tuân thủ các ràng buộc động học của UVA, cho phép chúng di chuyển xung quanh các chướng ngại vật và ngăn chặn hiệu quả sự va chạm giữa các UVA