Khách hàng: Đại học Tongji, Trường Cơ khí và Kỹ thuật Hàng không Vũ trụ
Ứng dụng: chụp chuyển động, cánh tay robot, robot cộng tác
Đối tượng: Chụp chuyển động, robot công nghiệp, hiệu chỉnh robot
Thiết bị sử dụng: 8 camera Nokov
Độ chính xác tuyệt đối của robot công nghiệp là chỉ số quan trọng để đánh giá hiệu suất tổng thể của chúng. Độ chính xác của robot có thể bị ảnh hưởng bởi các yếu tố như lỗi gia công, lỗi lắp ráp, độ mòn linh kiện, sự thay đổi tải của cơ cấu chấp hành cuối và thay đổi nhiệt độ. Điều này đặc biệt bất lợi trong một số ứng dụng nhất định bao gồm lắp ráp vệ tinh và lắp ráp máy bay có độ chính xác cao. Với sự phát triển và sử dụng liên tục của robot công nghiệp, yêu cầu về độ chính xác ngày càng tăng. Như vậy, việc nâng cao độ chính xác tuyệt đối của robot công nghiệp là một vấn đề quan trọng cần được giải quyết.
Nghiên cứu của Trường Cơ khí và Kỹ thuật Hàng không Vũ trụ tại Đại học Tongji đã đề xuất một phương pháp hiệu chuẩn mới nhằm cải thiện độ chính xác tuyệt đối của robot công nghiệp bằng cách sử dụng kết hợp hệ thống ghi lại chuyển động và Máy học sâu (Extreme Learning Machine – ELM) và mạng lưới thần kinh nhân tạo. Phương pháp đề xuất cải thiện đáng kể độ chính xác của tư thế robot so với các phương pháp hiệu chuẩn truyền thống. Nghiên cứu này cung cấp một cách tiếp cận mới để cải thiện hiệu suất và hiệu quả của robot công nghiệp trong nhiều lĩnh vực khác nhau.
Thử nghiệm xác nhận
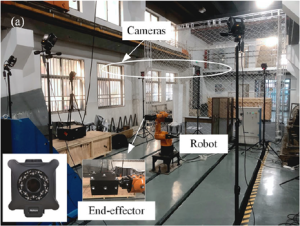
Robot công nghiệp được đặt ở trung tâm hình học của tám camera ghi chuyển động. Một thiết bị nhôm rỗng được gắn vào bộ phận tác động cuối bằng bu lông. Sau đó, mười lăm điểm đánh dấu phản chiếu được gắn vào mỗi khớp của robot và bộ phận tác động cuối, tổng cộng có khoảng chín mươi điểm đánh dấu. Trong quá trình thử nghiệm, 500 chuyển động trong tư thế của robot đã được chọn ngẫu nhiên và hệ thống ghi lại chuyển động NOKOV được sử dụng để liên tục ghi lại chuyển động của robot, thu thập vị trí và hướng của từng khớp. Dữ liệu này sau đó được sử dụng để hiệu chỉnh tham số DH. Cuối cùng, phương pháp hiệu chuẩn được đánh giá bằng cách sử dụng độ lệch chuẩn của sai số so với các phương pháp hiệu chuẩn động học truyền thống.
Kết quả thực nghiệm cho thấy, với nguồn sai số hình học và phi hình học ngày càng tăng, độ chính xác định vị của robot công nghiệp được cải thiện từ 3,073 độ lên 0,077 độ theo phương pháp hiệu chuẩn cải tiến. Điều này xác nhận tính hiệu quả của thuật toán và xác nhận kết quả mong đợi.
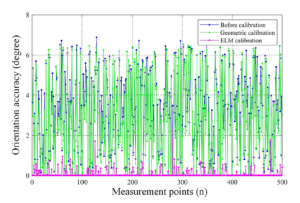
Độ chính xác định vị thí nghiệm
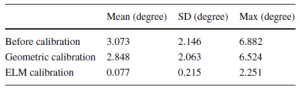
Tổng hợp các lỗi định vị của robot trong thí nghiệm