
Nền tảng rô bốt di động ROS2 |
|
LIMO PRO tích hợp NVIDIA Orin Nano cùng với camera đo độ sâu EAI T-mini Pro LiDAR và Orbbec Dabai. Điều này cho phép nhận thức và trí thông minh về môi trường mạnh mẽ cho các ứng dụng điều hướng tự động, tránh chướng ngại vật và nhận dạng trực quan. |
|
|
|
Chế độ lái vi sai bốn bánh của LIMO giúp việc lái xe trên mọi bề mặt trở nên dễ dàng. Dù là đường bê tông nhẵn hay đường cát thì LIMO vẫn hoạt động tốt. Tính linh hoạt này có lợi cho các nhà phát triển đang nghiên cứu các ứng dụng khác nhau. |

| SO SÁNH CÁC PHIÊN BẢN LIMO | |||
 |
|
|
|
| LIMO | LIMO PRO | LIMO ROS2 | |
| Kích thước | 322 x 220 x 251 mm | 322 x 220 x 251 mm | 322 x 220 x 251 mm |
| Khối lượng | 4,8 kg | 4,8 kg | 4,8 kg |
| Tải trọng | 4 kg | 4 kg | 4 kg |
| GC | 24 mm | 24 mm | 24 mm |
| Steering | 40 N.m | 40 N.m | 40 N.m |
| Màn hình | 7 inch | 7 inch | 7 inch |
| IPC | Jetson Nano | Orin Nano | Intel NUC |
| Camera | Obbec Dabai | Obbec Dabai | Obbec Dabai |
| Lidar | EAI X2L | EAI T-mini Pro | EAI T-mini Pro |
| Pin | 5.2 Ah 12V | 10 Ah 12V | 10 Ah 12V |
| Thời gian làm việc | 1 giờ | 2.5 giờ | 2.5 giờ |
| Trạng thái nghỉ | 2 giờ | 4 giờ | 4 giờ |
| OS | Ubuntu 18.04 | Ubuntu 20.04 | Ubuntu 22.04 |
| Phiên bản | ROS 1 Melodic | ROS 1 Noetic ROS 2 Foxy |
ROS 2 Humble |
| Phương pháp | Ứng dụng di động Điều khiển lệnh |
Ứng dụng di động Điều khiển lệnh |
Ứng dụng di động Điều khiển lệnh |
| Dải điều khiển | 10m | 10m | 10m |
 |
MÁY TÍNH NÂNG CAO
Được trang bị Jetson Nano, Orin Nano hay Intel NUC i7 mang tới cho rô bốt khả năng tính toán cực kỳ mạnh mẽ, cho phép tổng hợp dữ liệu đa cảm biến và ánh xạ SLAM ổn định hơn. |
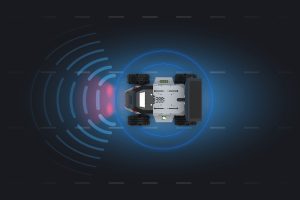
| CÁC CẢM BIẾN CHÍNH XÁC
Được trang bị với camera độ sâu Orbbec Dabai, tùy chọn cảm biến Lidar EAI X2L, EAI T-mini Pro giúp hỗ trợ lập bản đồ có độ chính xác cao và định vị tự động, lập kế hoạch điều hướng và tránh chướng ngại vật động. |
 |
 |
NHÂN ĐÔI THỜI GIAN SỬ DỤNG
Dung lượng pin được tăng lên 10000mAh (LIMO PRO/LIMO ROS2), giúp tăng cường đáng kể năng lượng và độ ổn định khi vận hành. |
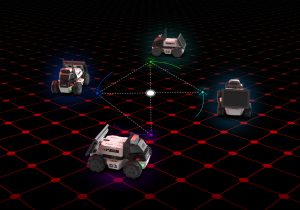
| PHỐI HỢP NHIỀU RÔ BỐT
Hỗ trợ nhiều robot thực hiện phối hợp bầy đàn và di chuyển đội tàu, cho phép nhận thức hợp tác, ra quyết định và kiểm soát.. |
 |
 |
HỖ TRỢ MÃ NGUỒN MỞ
Hỗ trợ nền tảng ROS và Gazebo, tương thích với các ngôn ngữ lập trình phổ biến như Python và C++. Khuyến khích người dùng mở rộng hoặc phát triển các ứng dụng robot. |









