| OS2 | ||
| Các đám mây điểm chất lượng hình ảnh cao trong một cảm biến cho phép triển khai xe tải tự lái, trục rô-bốt và tàu con thoi trong thế giới thực – được hỗ trợ bởi Chip L3 của Ouster. | ||
| 200m Dải tại 10% |
400m Dải tối đa |
22.5° Trường nhìn dọc |
| 128 Độ phân giải kênh |
2.6M Số điểm tối đa/giây |
± 2cm Độ chính xác tối đa |
| CẢM BIẾN VỚI DẢI LỚN NHẤT CỦA OUSTER |
| Được trang bị chip L3 đột phá, OS2 phát hiện các mục tiêu phản xạ 10% ở cự ly 200m và tự hào có phạm vi tối đa vượt quá 400m.. |
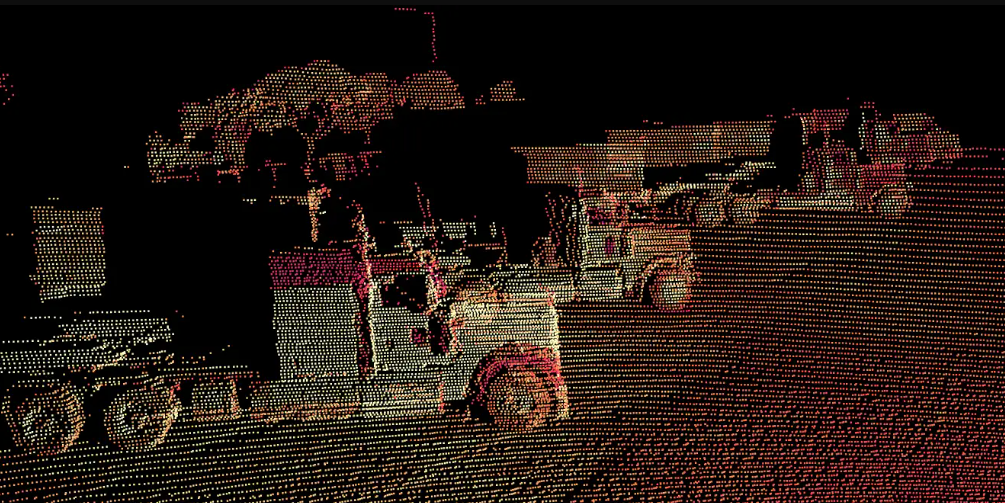
| ĐÁM MÂY ĐIỂM TUYỆT ĐẸP | ||
| Lên đến 2,6 triệu điểm mỗi giây cho dữ liệu phong phú, chi tiết. Chuẩn 128 kênh. Phản hồi kép ở chế độ 1024×10. | ||

|
||
| 128 Độ phân giải kênh |
2.6M Số điểm tối đa/ giây |
10x Độ nhạy photon |
| PHẠM VI DÀI PHÙ HỢP VỚI NGÂN SÁCH CỦA BẠN | ||
| Lidar tầm xa đã quá đắt trong một thời gian dài. Kiến trúc lidar kỹ thuật số đơn giản hơn của OS2 giúp sản xuất ít tốn kém hơn và ít tốn kém hơn khi triển khai trên hạm đội của bạn. | ||
| CAMERA NHÚNG CẬN HỒNG NGOẠI |
| Chip L3 của chúng tôi đại diện cho một bản nâng cấp lớn đối với lớp dữ liệu máy ảnh 2D độc đáo của Ouster. Giờ đây, bạn có thể chạy các thuật toán thị giác máy tính trên dữ liệu 2D tương quan hoàn hảo với dữ Lidar 3D, trong nhà và ngoài trời. |
| SỬ DỤNG CHIP L3 MỚI NHẤT | ||
| Chip L3 mang đến bước tiến cho lidar thuật số với các nâng cấp thay đổi từng bước về phạm vi, độ chính xác và độ tin cậy. | ||
| 21.47 Gmacs Của xử lý tín hiệu |
125 Million Tranzito trên chip |
5.2 M Số điểm tối đa/ giây |
 |
||
| BẢNG SO SÁNH DÒNG SẢN PHẨM OS | |||
 |
 |
 |
 |
| OSDome Hemisphere |
OS0 Ultra-Wide |
OS1 Mid-Range |
OS2 Long-Range |
| Trường nhìn 180° |
Trường nhìn 90° |
Trường nhìn 450° |
Trường nhìn 22.5° |
| Dải 20m (10%) |
Dải 35m (10%) |
Dải 90m (10%) |
Dải 200m (10%) |
| Dải thấp nhất 0.5m |
Dải thấp nhất 0.5m |
Dải thấp nhất 0.5m |
Dải thấp nhất 0.8m |
| Khối lượng 470g |
Khối lượng 500g |
Khối lượng 495g |
Khối lượng 1100g |
| Độ chính xác tới ±1cm |
Độ chính xác tới ±1cm |
Độ chính xác tới ±0.5cm |
Độ chính xác tới ±2cm |








